RTAB-Map: A Comprehensive Guide to Real-Time 3D Mapping and Localization
Related Articles: RTAB-Map: A Comprehensive Guide to Real-Time 3D Mapping and Localization
Introduction
In this auspicious occasion, we are delighted to delve into the intriguing topic related to RTAB-Map: A Comprehensive Guide to Real-Time 3D Mapping and Localization. Let’s weave interesting information and offer fresh perspectives to the readers.
Table of Content
RTAB-Map: A Comprehensive Guide to Real-Time 3D Mapping and Localization
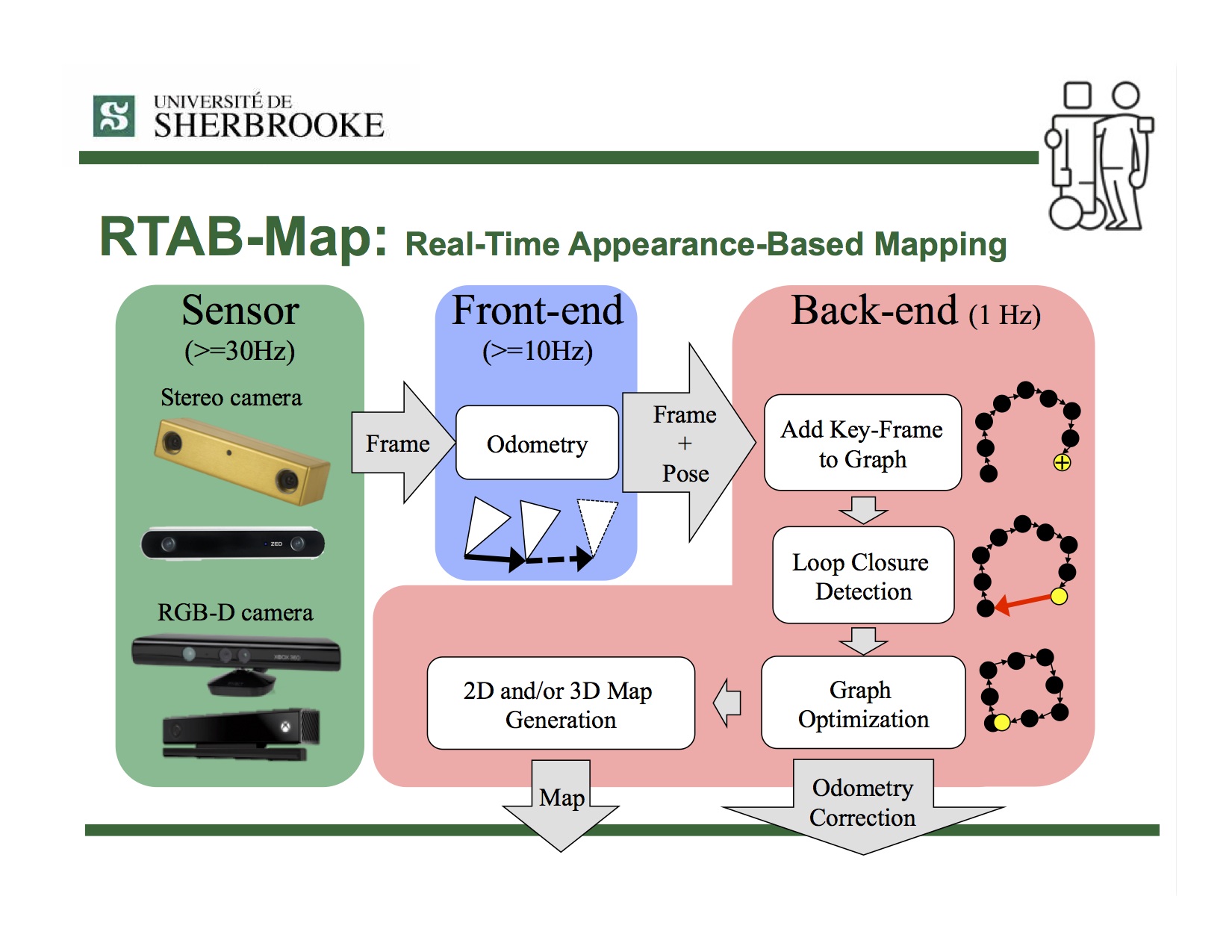
RTAB-Map, an acronym for "Real-Time Appearance-Based Mapping," is a robust open-source software library designed for real-time 3D reconstruction and localization. This powerful tool utilizes a combination of visual SLAM (Simultaneous Localization and Mapping) and loop closure techniques to create accurate and consistent 3D maps of environments.
Understanding the Core Concepts
At its heart, RTAB-Map operates on the principle of building a 3D model of an environment while simultaneously tracking the position and orientation of a robot or sensor within that environment. This process involves two key components:
-
SLAM: The SLAM algorithm processes sensor data, such as images or point clouds, to estimate the robot’s pose (position and orientation) and concurrently build a map of the surrounding environment.
-
Loop Closure: This crucial component plays a vital role in correcting accumulated errors during SLAM. When the robot revisits a previously mapped location, loop closure algorithms identify the overlap and use it to refine the map and the robot’s trajectory.
Benefits of RTAB-Map
The unique capabilities of RTAB-Map offer a range of benefits, making it a valuable tool for various applications:
-
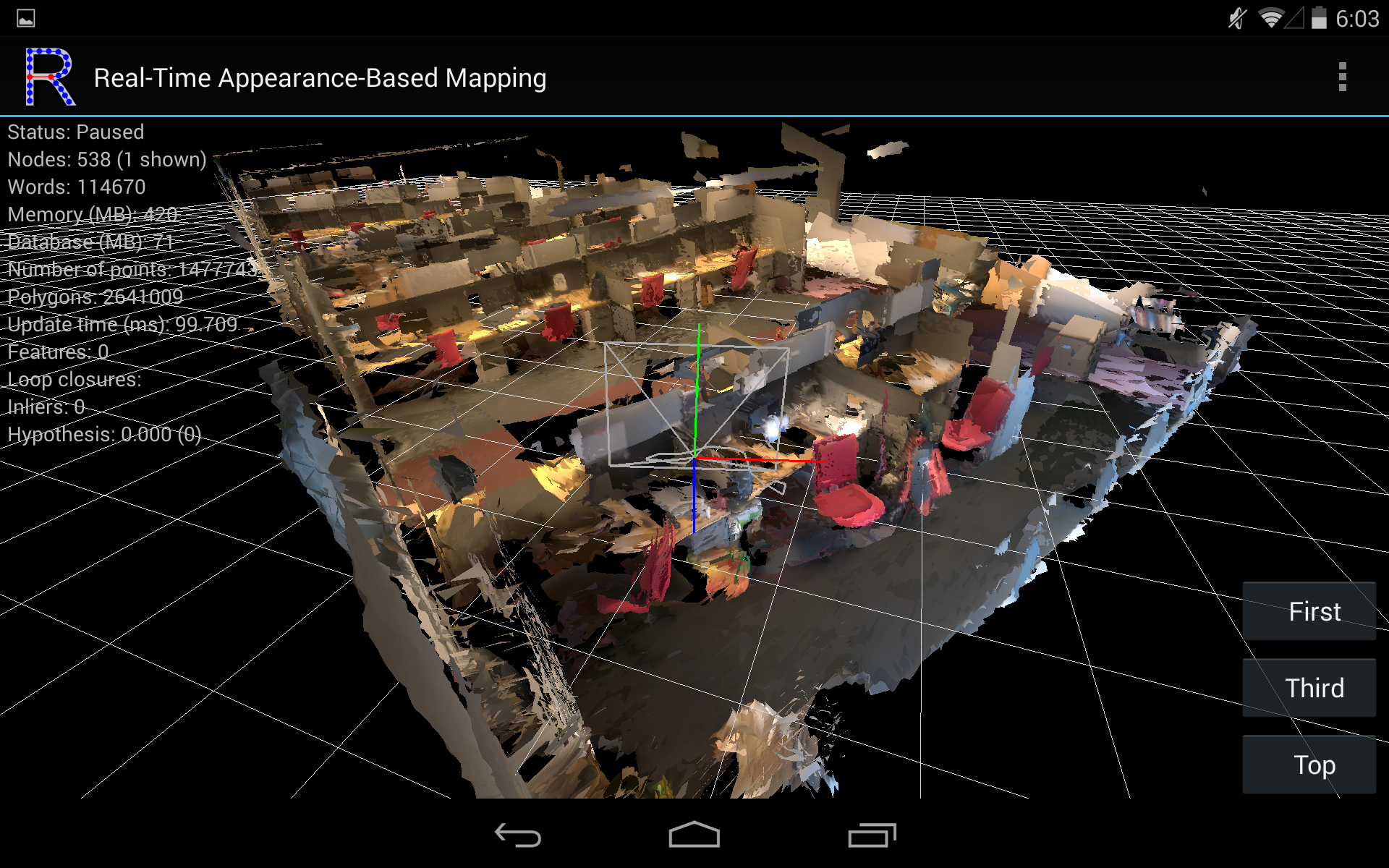
Robust and Accurate Mapping: RTAB-Map excels at creating accurate and consistent 3D maps, even in complex environments with challenging lighting conditions or repetitive features.
-
Real-Time Performance: The library is designed for real-time operation, enabling rapid map creation and localization, making it ideal for applications requiring immediate feedback.
-
Loop Closure for Enhanced Accuracy: The implementation of loop closure techniques significantly improves the accuracy of the generated maps by correcting accumulated errors and ensuring consistency.
-
Versatile Sensor Support: RTAB-Map supports a wide range of sensors, including cameras, depth sensors, and LiDARs, offering flexibility for diverse applications.
-
Open-Source Availability: Being open-source, RTAB-Map allows for customization and integration with other software systems, fostering innovation and research within the robotics community.
Applications of RTAB-Map
The versatility of RTAB-Map makes it suitable for a broad spectrum of applications, including:
-
Robotics:
- Navigation: RTAB-Map enables robots to navigate autonomously in complex environments by providing accurate localization and map information.
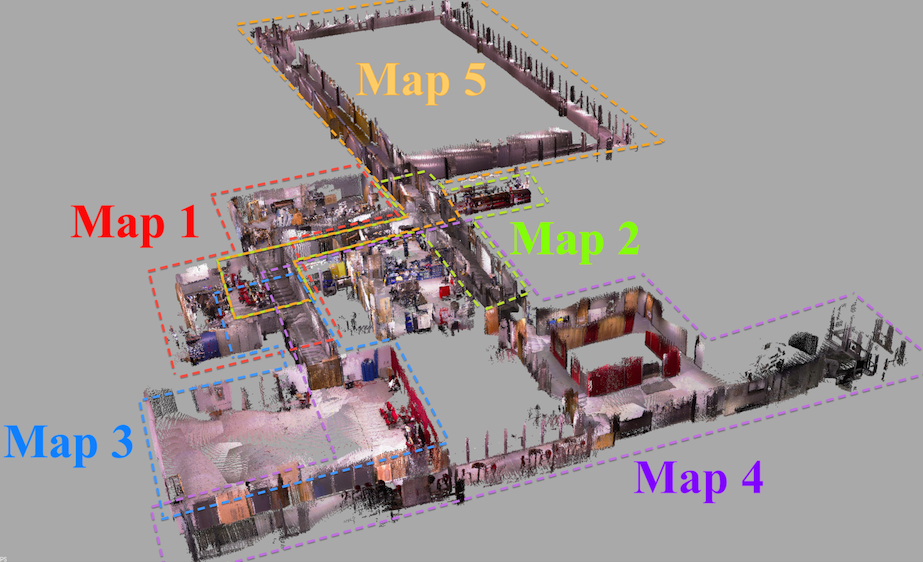
- Mapping: It facilitates the creation of detailed 3D maps for various purposes, such as autonomous exploration, path planning, and environment analysis.
- Object Recognition: RTAB-Map can be used to identify and track objects within the mapped environment, enabling tasks such as object manipulation and inventory management.
-
Autonomous Vehicles:
- Self-Driving Cars: RTAB-Map plays a crucial role in enabling self-driving cars to perceive and navigate their surroundings, creating accurate maps and localizing themselves within those maps.
- Automated Guided Vehicles (AGVs): In warehouses and manufacturing facilities, RTAB-Map enables AGVs to navigate autonomously, improving efficiency and safety.
-
AR/VR:
- Virtual Environments: RTAB-Map can be used to create realistic 3D models of real-world environments for virtual reality applications, enhancing the immersive experience.
- Augmented Reality: RTAB-Map enables the integration of digital content into real-world scenes, providing users with augmented reality experiences.
-
Other Applications:
- 3D Modeling: RTAB-Map can be used to generate accurate 3D models of various environments, including buildings, historical sites, and archaeological excavations.
- Surveillance: RTAB-Map can be integrated into surveillance systems to create 3D maps of monitored areas, enabling efficient monitoring and analysis.
Frequently Asked Questions
Q: How does RTAB-Map handle dynamic environments with changing objects?
A: While RTAB-Map is primarily designed for static environments, it can handle dynamic objects to a certain extent. It employs techniques like object tracking and filtering to minimize the impact of dynamic elements on the map.
Q: What are the limitations of RTAB-Map?
A: RTAB-Map, like any other SLAM system, has its limitations:
- Computational Resources: It requires significant computational resources, especially for large environments or high-resolution sensor data.
- Accuracy in Challenging Environments: Its accuracy can be affected by factors like poor lighting, repetitive textures, or dynamic objects.
- Drift: While loop closure helps reduce drift, it cannot completely eliminate it, especially in very large environments.
Q: How can I improve the performance of RTAB-Map?
A: The performance of RTAB-Map can be optimized by:
- Choosing the right sensor: Selecting a sensor with high resolution and suitable field of view can significantly improve accuracy.
- Tuning the parameters: Optimizing the parameters of the algorithm, such as feature extraction and loop closure thresholds, can enhance performance.
- Preprocessing the data: Preprocessing sensor data to remove noise and outliers can improve the reliability of the results.
Tips for Using RTAB-Map
- Start with a simple environment: Begin by testing RTAB-Map in a controlled environment with minimal clutter and dynamic objects.
- Experiment with different parameters: Adjust the parameters of the algorithm to find the optimal settings for your specific application.
- Use a good sensor: Invest in a high-quality sensor with appropriate resolution and field of view for accurate mapping.
- Leverage the open-source community: Seek help and guidance from the active RTAB-Map community for troubleshooting and optimization.
Conclusion
RTAB-Map stands as a powerful and versatile tool for real-time 3D mapping and localization. Its robust algorithms, open-source availability, and support for diverse sensors make it an invaluable asset for researchers, developers, and practitioners working in robotics, autonomous vehicles, AR/VR, and other fields. While it has limitations, the benefits offered by RTAB-Map outweigh its drawbacks, making it a highly effective and widely adopted solution for a wide range of applications. As the field of robotics continues to evolve, RTAB-Map will undoubtedly play an increasingly important role in driving innovation and advancement.





Closure
Thus, we hope this article has provided valuable insights into RTAB-Map: A Comprehensive Guide to Real-Time 3D Mapping and Localization. We thank you for taking the time to read this article. See you in our next article!